FU122故障代碼出現中智電氣伺服驅動器上,表示絕對位置模式產品匹配故障。絕對位置模式產品匹配故障的主要原因如下:1、絕對位置模式下檢測電機不匹配或電機編號設置錯誤處理辦
FU121伺服 ON 指令無效故障出現中智電氣伺服驅動器上,表示伺服 ON 指令無效故障。伺服 ON 指令無效故障的主要原因如下:1. 內部使能情況下,外部 伺服使能信號 (S-ON) 有效,確認
FU120故障代碼出現中智電氣伺服驅動器上,表示產品匹配故障。產品匹配故障的主要原因如下:1.產品編號(電機或驅動器)不存在處理辦法:1、內部故障碼P0B45=0120或1120查看電機銘牌是
FU108故障代碼出現中智電氣伺服驅動器上,表示參數存儲故障。參數存儲故障的主要原因如下:1、參數寫入出現異常2、參數讀取出現異常處理辦法:更改某參數后,再次上電,查看該參數值
FU105故障代碼出現中智電氣伺服驅動器上,表示內部程序異常。內部程序異常的主要原因及處理辦法如下:1、EEPROM 故障:按照 FU101 的方法確認,系統參數恢復初始化(P02-31=1)后,重新
FU104故障代碼出現中智電氣伺服驅動器上,表示可編程邏輯中斷故障。可編程邏輯中斷故障的主要原因如下:1、FPGA故障(FU.104)2、FPGA與MCU通信握手異常(FU.100)3、驅動器內部運
FU102故障代碼出現中智電氣伺服驅動器上,表示可編程邏輯配置故障。可編程邏輯配置故障的主要原因及處理辦法如下:1、FPGA和MCU軟件版本不匹配:通過面板或驅動調試平臺等途徑,查
FU101故障代碼通常出現中智電氣伺服驅動器上,表示伺服內部參數出現異常。伺服內部參數出現異常的主要原因及處理辦法如下:1、控制電源電壓瞬時下降:測量運行過程中控制電線纜的
一、設備安裝1. 安裝環境:確保伺服驅動器安裝在無塵、干燥、通風良好、溫度適宜的環境中,遠離高溫、高濕、強磁場、強振動源和腐蝕性氣體。2. 電源連接:伺服驅動器的電源連接應
當伺服驅動器與控制器之間的通信出現異常時,可以按照以下步驟進行排查:1. 檢查硬件和電纜連接:首先,確保所有設備之間的連接都是正確的,并且電纜沒有損壞或脫落。可以嘗試重新插
伺服驅動器溫度過高是一個常見的問題,如果不及時處理,可能會導致驅動器性能下降或損壞。以下是一些應對伺服驅動器溫度過高的建議:1. 加強散熱:●確保驅動器的散熱系統正常運行,
當伺服驅動器控制的電機運動出現異常時,可以通過以下步驟進行調整:1. 初始化參數: - 在控制卡上,選擇適當的控制方式,并將PID參數清零。 - 確保控制卡上電時默認使能信號關閉
優化伺服驅動器的散熱效果是確保其穩定運行和延長使用壽命的關鍵。以下是一些建議來優化伺服驅動器的散熱效果:1. 合理選用散熱器:●根據伺服驅動器的功率和散熱需求,選擇表面
優化伺服驅動器的性能可以從多個方面入手,以下是一些建議:1. 合理調整控制系統參數:根據應用需求和場景,合理調整伺服驅動器的控制參數,如增益、偏置、速度環和位置環等。通過優
要優化伺服驅動器的參數以提高定位精度,可以采取以下步驟:1.了解伺服驅動器的基本參數:首先需要了解伺服驅動器的基本參數,如位置比例增益、位置前饋增益、速度比例增益等,這些參
伺服驅動器作為工業自動化系統中的核心組件,其制動原理在保障系統安全穩定方面發揮著至關重要的作用。伺服驅動器通過精確的控制、快速的響應、強大的穩定性、高可靠性、多重
伺服驅動器的控制模式選擇主要取決于具體應用需求,包括對電機的速度、位置、轉矩的精度要求,以及實時性的要求等。如果對電機的速度、位置都沒有要求,只要輸出一個恒轉矩,那么使
伺服驅動器的供電和脈沖信號分離的具體實現方式取決于所使用的伺服驅動器和設備配置。一般來說,伺服驅動器需要穩定的電源來保證其正常工作,同時還需要脈沖信號來控制其運動。
伺服驅動器實現對伺服電機的力矩控制,主要采用轉矩控制方式。在這種模式下,外部模擬量的輸入或直接地址的賦值用于設定電機軸對外輸出的轉矩大小。可以即時的改變模擬量的設定
伺服驅動器通過位置控制模式實現對伺服電機的位置控制。在這種模式下,外部輸入的脈沖的頻率確定電機的轉速,而脈沖數確定電機的旋轉角度。一些伺服驅動器可以通過通信方式直接
伺服驅動器的供電和脈沖信號在一般情況下是需要連接在一起的,因為伺服驅動器需要穩定的電源來保證其正常工作,同時還需要脈沖信號來控制其運動。然而,有些伺服驅動器可以通過不
伺服驅動器實現高精度定位主要依賴于以下幾個方面:1.硬件設計:伺服驅動器的硬件設計需要考慮到電機的參數、控制算法的硬件實現、功率電路的配置等問題。在硬件設計階段,需要考
伺服驅動器的控制模式選擇主要取決于具體應用需求,包括對電機的速度、位置、轉矩的精度要求,以及實時性的要求等。 如果對電機的速度、位置都沒有要求,只要輸出
伺服驅動器的維護和保養對于其正常工作和延長使用壽命非常重要。以下是一些需要注意的事項:1.保持清潔:伺服驅動器應該保持清潔,避免灰塵和雜物的進入。在操作過程中,應該定期清
伺服驅動器是一種將電信號轉換為機械動作的裝置,用于控制電動機的運動。根據不同的分類標準,伺服驅動器有多種類型。以下是伺服驅動器的幾種主要分類方式:1.按照功率分類根據功
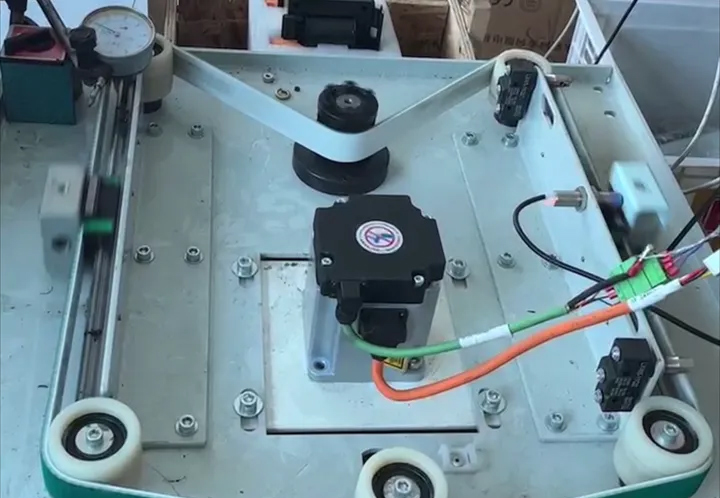
在紡織行業的不斷發展中,技術創新始終是推動產業升級的關鍵力量。中智電氣自主研發生產的 ZE 系列伺服電機及 MZ630P 系列伺服驅動器,以其優越的性能和可靠的品質,成功應用于倍
掃一掃打開手機網站
掃一掃關注中智微信
 18913354648
18913354648
18913354648
18913354648